
 管道自动焊机-自动焊接机-自动焊接设备-览众科技
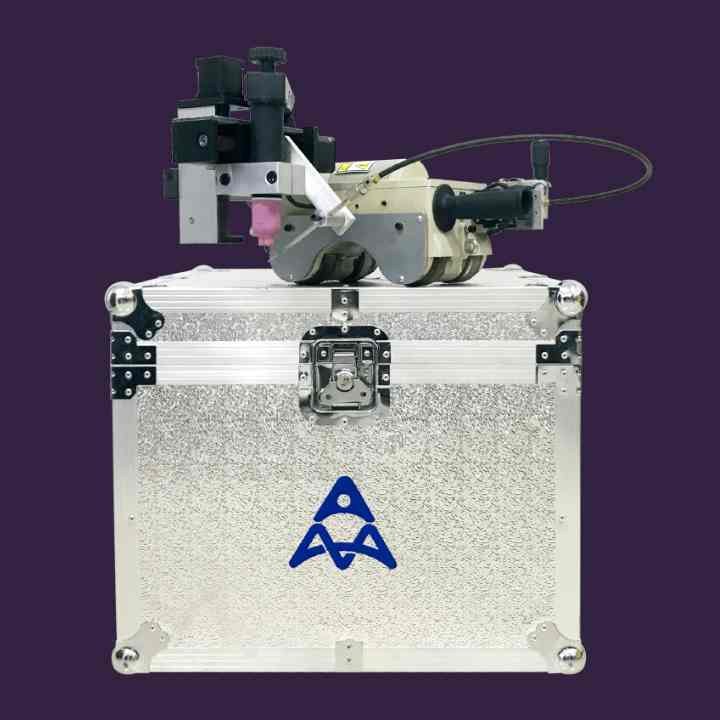
管道自动焊机-自动焊接机-自动焊接设备-览众科技 大家好,我是览众焊接机器人的小编,今天给大家介绍一下热力管道平焊自动管道焊接机器人 理想的焊接设备,所谓的热力管道平焊自动管道焊接机器人 理想的焊接设备其实是一种自动焊接设备,属于焊接机器人的一种。这种自动焊设备运用磁吸式焊接小车绕管爬行的自动焊接方法,热力管道平焊自动管道焊接机器人 理想的焊接设备实现了管道的全位置自动焊接,即平焊自动焊接、下向焊自动焊接、仰面自动焊接和向上自动焊接。
自动焊接专用设备(Automatic welding special equipment)是专门为特定工件和特定形状的焊接接头设计的焊接自动化设备。 通过电气控制、气动控制和液压控制技术,可以实现电机、气动执行器和液压执行器的旋转或运动,实现工件焊缝和焊枪的相对运动,从而自动完成焊缝的焊接工作。
随着管线钢碳当量的降低,焊接中对氢致裂纹的敏感性降低。避免开裂所需的工艺措施减少,焊接热影响区的性能损伤程度降低。 然而,管线钢在焊接过程中会经历一系列复杂的非平衡物理和化学过程,这可能会导致焊接区缺陷或降低接头性能,主要包括焊接热影响区的焊接裂纹和脆化。

现场焊接时,喷嘴对准应使用嘴对准装置进行。为了提高效率,一般将基础梁木桩或土桩放在对齐的管口下方,并在焊接前一个对接接头的同时开始下一个对接接头的准备工作。这将导致更大的额外压力 同时,由于钢管的热膨胀和冷收缩的影响,当接触死接头时,很可能由于额外的应力而引起问题。
览众管道气保自动焊接设备采用实芯焊丝(φ 0.8 ~ φ 1.0),采用CO2或混合气体(CO2+氩) 焊接方向是向下焊接。焊丝进给速度、焊接速度、摆动频率等焊接工艺参数由焊接工艺参数输入装置输入,焊工不能修改(或者只能在一定程度上修改某些参数),以保证每个焊接机器人和每个接头的焊接工艺参数的一致性。 从而保证各焊接接头焊接质量的均匀性,达到保证焊接质量的目的。
在我国的锅炉、压力容器和管道制造企业中,各种先进的高效焊接方法得到了推广和使用,并引进了大量现代焊接设备。焊接生产工艺达到了较高水平。为了满足对锅炉、压力容器和管道日益增长的需求,有必要进一步开发和推广生产效率更高的先进焊接方法和工艺。
焊缝跟踪和偏差控制是实现焊接自动化的关键技术。 在环境信息采集过程中,视觉传感器具有信息量大、精度高、不与工件接触等优点。,具有良好的应用空间和前景。 根据不同的成像光源,视觉传感器可以分为主动视觉传感器和被动视觉传感器 无源视觉传感器使用摄像机直接获取视觉信息,无需辅助光源,具有抗干扰能力强、系统结构简单、成本低等优点。
工艺管道环缝组装难以达到均匀一致的高精度,需要自动管道焊接机根据坡口尺寸和偏差自动调整焊枪位置,从而实现焊缝的自动跟踪。然而,由于焊接过程中应用环境恶劣,传感器容易受到弧光、高温、烟雾、飞溅、振动和电磁场的干扰,很难实现焊缝的自动跟踪。览众借助高精度视觉传感器和机器视觉技术开发了管道全位置焊接过程中的焊缝跟踪功能,大大提升了焊接质量与焊接效率,降低了操作者的学习难度、工作难度与强度。
览众自动焊关键技术集自动控制和人工干预于一体,解决了我国管道施工中因坡口加工误差大、现场组对不准、对接间隙不同而造成的自动焊接难题。 自动焊接一次合格率可达98% 这是该设备与国内外其他类似设备相比最明显的优势。 这一特点是在我国的工作条件下,自动管道焊接设备能够达到工程实用的重要条件。
以上就是给大家介绍有关热力管道平焊自动管道焊接机器人 理想的焊接设备的内容,如果你喜欢我分享的文章,请关注览众自动焊接机器人。




