
 管道自动焊机-自动焊接机-自动焊接设备-览众科技
管道自动焊机-自动焊接机-自动焊接设备-览众科技 大家好,我是览众焊接机器人的小编,今天给大家介绍一下现场施工立焊焊接机器手 有了它焊接不犯难了,所谓的现场施工立焊焊接机器手 有了它焊接不犯难了其实是一种自动焊接设备,属于焊接机器人的一种。这种自动焊设备运用磁吸式焊接小车绕管爬行的自动焊接方法,现场施工立焊焊接机器手 有了它焊接不犯难了实现了管道的全位置自动焊接,即平焊自动焊接、下向焊自动焊接、仰面自动焊接和向上自动焊接。
管道环缝焊接大多在现场施工现场进行,通常工作环境恶劣,劳动强度高,对焊工的技术要求高。 由于焊接工作非常艰苦,随着人口老龄化,国内外高级焊接技术人员短缺。览众现场施工管道焊接机器人的应用可以改善这些问题。它不仅可以作为多种焊接技术使用,而且可以快速批量生产,弥补了焊工培训时间长、焊接质量低的缺点。
便携式管道自动焊接机器人,可以实现管道自动焊接,主要有以下优点:(1)焊接质量和效率成倍提高;(2)管道建设成本显著降低;(3)让工人脱离高强度体力劳动,减少人身伤害;(4)减少建设项目对高级技术人员的依赖;
目前,我国投入使用的管道自动焊接设备大多是焊接机械手或固定管道预制系统。焊接工件只能在工厂车间预制,然后运输到施工现场,由焊工焊接。手工电弧焊仍主要用于现场管道施工,是目前管道焊接施工现场常见的生产方法,存在诸多不便。因此,览众现场施工管道焊接机器人在我国有很大的应用和发展空间。
由于发现和开采的油气田位于偏远地区,地理、气候、地质条件恶劣,社会支持条件差,给建设带来了许多困难,尤其是低温带来的麻烦最大。
焊接参数如电流、电压、焊枪摆动速度、摆动幅度、两端停留时间等可以在焊接前设定,也可以在焊接过程中实时调整。 驱动控制系统采用基于脉宽调制调速的DC伺服驱动控制技术和位移传感检测闭环控制系统,定位精度高,抗干扰能力强,实现了现场使用所需的可靠性和耐久性。为了实现高摆动速度下摆动的精确控制,本项目采用位置反馈摆动控制传感电路。通过专门设计的传感器,摆动系统的位移转化为可控电信号,同时具有位置记忆功能。适用于大中型长输管道固定连接接头的全位置焊接。
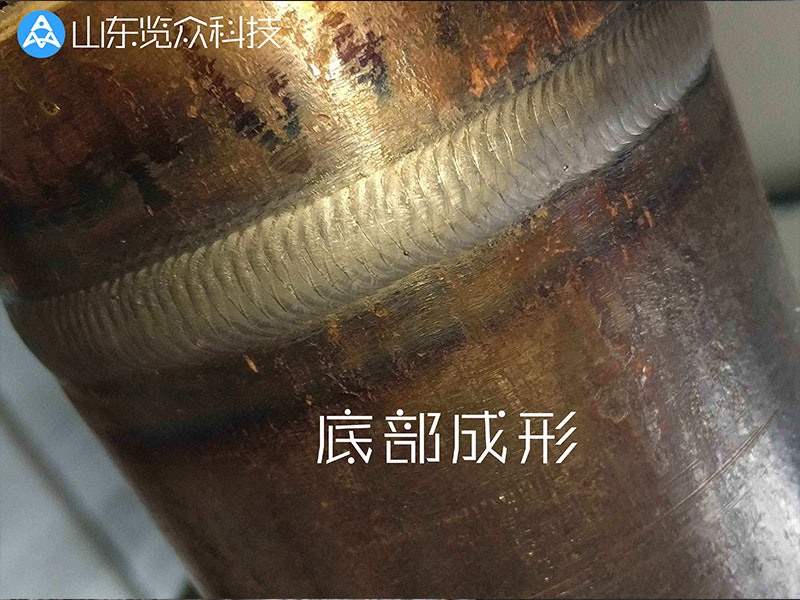
览众管道气保自动焊接设备采用实芯焊丝(φ 0.8 ~ φ 1.0),采用CO2或混合气体(CO2+氩) 焊接方向是向下焊接。焊丝进给速度、焊接速度、摆动频率等焊接工艺参数由焊接工艺参数输入装置输入,焊工不能修改(或者只能在一定程度上修改某些参数),以保证每个焊接机器人和每个接头的焊接工艺参数的一致性。 从而保证各焊接接头焊接质量的均匀性,达到保证焊接质量的目的。
以上就是给大家介绍有关现场施工立焊焊接机器手 有了它焊接不犯难了的内容,如果你喜欢我分享的文章,请关注览众自动焊接机器人。




