管道自动焊机-自动焊接机-自动焊接设备-览众科技
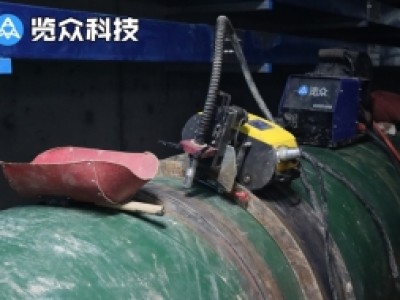
管道自动焊机-自动焊接机-自动焊接设备-览众科技 大家好,我是览众焊接机器人的小编,今天给大家介绍一下无轨道电焊机器人焊接电力管道,焊接方式太先进,所谓的无轨道电焊机器人焊接电力管道,焊接方式太先进其实是一种自动焊接设备,属于焊接机器人的一种。这种自动焊设备运用磁吸式焊接小车绕管爬行的自动焊接方法,无轨道电焊机器人焊接电力管道,焊接方式太先进实现了管道的全位置自动焊接,即平焊自动焊接、下向焊自动焊接、仰面自动焊接和向上自动焊接。
管径的增加和输送压力的增加都要求管道具有更高的强度。近年来,在保证焊接性和冲击韧性的前提下,管材的强度有了很大提高。由于管道铺设完全由焊接过程完成,焊接质量在很大程度上决定了工程质量,焊接是管道施工的关键环节 然而,管道、焊接材料、焊接工艺和焊接设备是影响焊接质量的关键因素。

现场焊接时,喷嘴对准应使用嘴对准装置进行。为了提高效率,一般将基础梁木桩或土桩放在对齐的管口下方,并在焊接前一个对接接头的同时开始下一个对接接头的准备工作。这将导致更大的额外压力 同时,由于钢管的热膨胀和冷收缩的影响,当接触死接头时,很可能由于额外的应力而引起问题。

焊缝跟踪和偏差控制是实现焊接自动化的关键技术。 在环境信息采集过程中,视觉传感器具有信息量大、精度高、不与工件接触等优点。,具有良好的应用空间和前景。 根据不同的成像光源,视觉传感器可以分为主动视觉传感器和被动视觉传感器 无源视觉传感器使用摄像机直接获取视觉信息,无需辅助光源,具有抗干扰能力强、系统结构简单、成本低等优点。
焊接是石化设备安装的主要环节,直接影响设备性能。 石油化工设备的焊接结构有很多种,它们的工作条件各不相同。工作介质一般具有高温、高压、易燃、易爆、低温和腐蚀的特点,对设备用钢和相应的焊接工艺提出了更高的要求。
随着管线钢碳当量的降低,焊接中对氢致裂纹的敏感性降低。避免开裂所需的工艺措施减少,焊接热影响区的性能损伤程度降低。 然而,管线钢在焊接过程中会经历一系列复杂的非平衡物理和化学过程,这可能会导致焊接区缺陷或降低接头性能,主要包括焊接热影响区的焊接裂纹和脆化。
现场焊接位置为管道水平固定或倾斜固定对接,包括水平焊接、垂直焊接、顶焊、水平焊接等焊接位置。 因此,对焊工的操作技术提出了越来越高的要求。
随着国内外油气管道向高钢级、大直径、高压方向发展,对管道工程建设的要求越来越高。 特别是对于X80、X90、X100等高档钢管的应用,自动焊接技术的充分应用是高质量、高效率的长输管道焊接的必然发展趋势。 数据显示,在过去10年欧美发达国家新建的管道中,自动焊接技术的比例超过85% 然而,在中国,这一数字不到5% 精通和应用自动焊接技术不仅是管道行业的发展趋势,也是我国管道施工企业开拓海外市场的利器。
为了在焊接过程中调整钨电极的位置,引用了模糊逻辑理论,即所谓的奇数理论。根据测得的钨电极位移和前一节距的校正速度计算当前节距中钨电极位置的校正速度,以确保校正精度。
以上就是给大家介绍有关无轨道电焊机器人焊接电力管道,焊接方式太先进的内容,如果你喜欢我分享的文章,请关注览众自动焊接机器人。