管道自动焊机-自动焊接机-自动焊接设备-览众科技
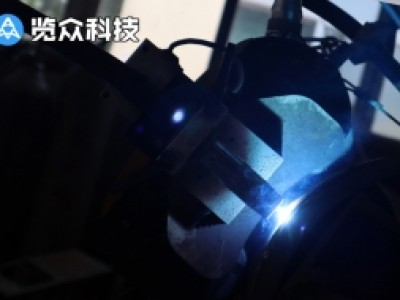
管道自动焊机-自动焊接机-自动焊接设备-览众科技 大家好,我是览众焊接机器人的小编,今天给大家介绍一下全位置管道自动焊机,焊接出漂亮的鱼鳞纹,所谓的全位置管道自动焊机,焊接出漂亮的鱼鳞纹其实是一种自动焊接设备,属于焊接机器人的一种。这种自动焊设备运用磁吸式焊接小车绕管爬行的自动焊接方法,全位置管道自动焊机,焊接出漂亮的鱼鳞纹实现了管道的全位置自动焊接,即平焊自动焊接、下向焊自动焊接、仰面自动焊接和向上自动焊接。
焊接参数如电流、电压、焊枪摆动速度、摆动幅度、两端停留时间等可以在焊接前设定,也可以在焊接过程中实时调整。 驱动控制系统采用基于脉宽调制调速的DC伺服驱动控制技术和位移传感检测闭环控制系统,定位精度高,抗干扰能力强,实现了现场使用所需的可靠性和耐久性。为了实现高摆动速度下摆动的精确控制,本项目采用位置反馈摆动控制传感电路。通过专门设计的传感器,摆动系统的位移转化为可控电信号,同时具有位置记忆功能。适用于大中型长输管道固定连接接头的全位置焊接。
焊接作为一种工业“裁缝”,是工业生产中非常重要的加工方法。同时,由于焊接粉尘、弧光和金属飞溅的存在,焊接的工作环境非常恶劣,焊接质量对产品质量起着决定性的作用。遗憾的是,虽然我国已经有了具有自主知识产权的焊接机器人系列产品,但不能批量生产,也不能形成规模。

现代项目中使用的现代设备当然需要现代的组织和管理。传统的施工队伍组织管理模式明显不适合自动化焊接技术效益的正常发挥。这就需要在管理人员素质、管理体系建设、施工组织形式和薪酬激励机制等方面进行变革和进步。 这方面也需要系统深入地研究。
为了满足现场要求,达到焊接质量,提高劳动效率,本发明具有重量轻、操作简单、体积小、安装调试维护方便的优点,管道焊接工程的现场施工在现场进行,一般施工周期相对较长。小型现场管道自动焊接机一般是采用全位置自动焊接。它由控制系统和机械系统组成,全位置管道自动焊机的执行系统是一个磁吸式小车机械系统。
在我国的锅炉、压力容器和管道制造企业中,各种先进的高效焊接方法得到了推广和使用,并引进了大量现代焊接设备。焊接生产工艺达到了较高水平。为了满足对锅炉、压力容器和管道日益增长的需求,有必要进一步开发和推广生产效率更高的先进焊接方法和工艺。
随着高灵敏度传感技术、计算机控制技术和精密机械的发展,焊接过程的全自动化已经从实验室进入工业生产领域。锅炉、压力容器和管道制造业有望率先实现焊接生产过程的全自动化。
焊缝跟踪和偏差控制是实现焊接自动化的关键技术。 在环境信息采集过程中,视觉传感器具有信息量大、精度高、不与工件接触等优点。,具有良好的应用空间和前景。 根据不同的成像光源,视觉传感器可以分为主动视觉传感器和被动视觉传感器 无源视觉传感器使用摄像机直接获取视觉信息,无需辅助光源,具有抗干扰能力强、系统结构简单、成本低等优点。
根据工件结构的不同形式,可以使用专业的焊接夹具和相应的焊接电源来进行各种焊接操作。实用性强,自动化程度高,焊缝成形美观,能有效提高焊接质量和生产效率。