览众科技:管道自动焊机-自动焊接机-自动焊接设备
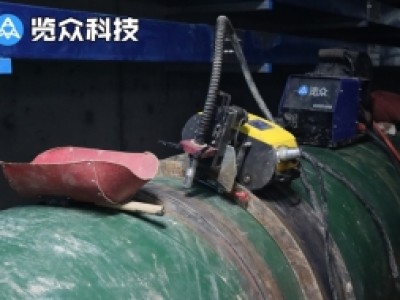
览众科技:管道自动焊机-自动焊接机-自动焊接设备 磁吸式不锈钢管道自动焊接设备
根据石化设备在现场组装和维修过程中的焊接特点,国内外相关研究机构开发了一系列焊接机器人系统,基本实现了遥控自动焊接操作,在这个过程中,览众机器人较早的设计了无线遥控、焊缝跟踪和自动调参等前瞻性的功能。随着工业场合对焊接质量和自动化要求的不断提高,相关焊接机器人的智能将进一步提高。
关于创新的道路应该首先从战略角度来分析,日本、韩国和德国的做法很值得借鉴。例如日本在面对第一次石油危机的冲击,提出发展CO2气体保护焊和工业机器人技术以保持汽车和造船业的竞争力的战略性创新;韩国解决依赖外国关键技术由政府引导和部分资助企业为主导的产学研结合的创新;德国和欧盟发展新工艺、新技术来弥补劳力成本高以提高造船和汽车行业的国际竞争实力的系统成套创新等。
大口径管道对接全位置钨极氩弧焊是一种非常困难的焊接操作。为了克服对焊工技能的依赖,消除人为因素对产品焊接质量的不利影响,览众创始团队提出开发一种全自动焊机的想法,该焊机模拟高技能焊工的智能和操作要领。览众自动焊接机可用于直径为108-2000毫米、壁厚为4.0-50.0毫米的不锈钢管环缝的全位置焊接,采用窄间隙填丝钨极氩弧焊(多层多道焊接工艺)。
在石化管道工程施工中,管道焊接质量和焊接效率直接影响施工进度 由于管道本身的结构特点,一般管道焊接是全位置焊接。生产管道焊接机器人商业产品的外国公司主要包括美国的华润埃文斯(CRC-Evans)、法国的Serimax、荷兰的Vermaat Technologies、意大利的赛佩姆(Saipem)等。 美国的CRC Evans是第一个将全位置气体保护焊技术应用于管道建设的公司。览众是国内较早研发全位置自动管道焊接机器人的公司,览众自主研发设计生产的全位置自动管道自动焊机器人具有前瞻性的功能,可以实时自动调整焊接参数、无线控制、焊缝跟踪。
进入21世纪以来,我国的科学技术水平飞速发展。机器人技术在国内外取得了广泛的发展,并已广泛应用于各行各业和各个领域。 机器人的广泛使用促进了生产,改变了人们的生活。如今,机器人负责一些重要的工作和危险的工作。
为了在焊接过程中调整钨电极的位置,引用了模糊逻辑理论,即所谓的奇数理论。根据测得的钨电极位移和前一节距的校正速度计算当前节距中钨电极位置的校正速度,以确保校正精度。