览众科技:管道自动焊机-自动焊接机-自动焊接设备
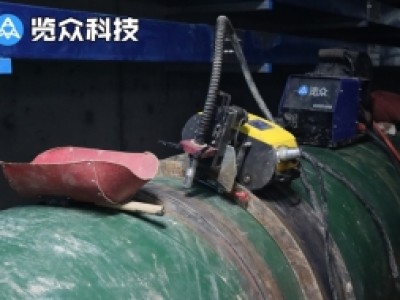
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下消防合金管道焊接机器人,所谓的消防合金管道焊接机器人其实是一种自动焊接设备,属于焊接机器人的一种。消防合金管道焊接机器人运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
中国2005年钢产量达到3.49亿吨,成为世界最大的钢材生产与消费国,而焊接结构的用钢量也突破1.3亿吨,相当于美国一年的钢产量,成为世界上空前最大的焊接钢结构制造国。

焊接时,为了抢进度,对于中厚板对接焊缝采取不开坡口。强度指标下降,甚至达不到标准要求,弯曲试验时出现裂纹,这样会使焊缝接头性能不能保证,对结构安全构成潜在危害。【措施】焊接时要按工艺评定中的焊接电流控制,允许有10~15%浮动,坡口的钝边尺寸不宜超过6mm。对接时,板厚超过6mm时,要开坡口进行焊接。

选择手工电弧焊焊条型号,首先应按与主体金属强度相适应的原则确定焊条系列,即两者强度应相等。当不同强度的钢材连接时,采用与低强度钢材相适应的焊条系列,即可满足强度等方面的要求并且较经济。然后再结合钢材的牌号、结构的重要性、焊接位置和焊条工艺性能等选择具体型号。
该焊接设备适用于各种坡口形式的焊接。当用于焊接V形坡口时,除了焊接效率窄、间隙坡口低(仍可达到手工焊接的2-5倍)外,其他焊接的优点仍然突出,览众焊接设备可以替代手工电弧焊的焊接动作,自动完成焊接动作。焊缝内部成形均匀,表面美观,可以解决手工焊接成品率低、焊接操作速度慢的问题。
焊接参数如电流、电压、焊枪摆动速度、摆动幅度、两端停留时间等可以在焊接前设定,也可以在焊接过程中实时调整。 驱动控制系统采用基于脉宽调制调速的DC伺服驱动控制技术和位移传感检测闭环控制系统,定位精度高,抗干扰能力强,实现了现场使用所需的可靠性和耐久性。为了实现高摆动速度下摆动的精确控制,本项目采用位置反馈摆动控制传感电路。通过专门设计的传感器,摆动系统的位移转化为可控电信号,同时具有位置记忆功能。适用于大中型长输管道固定连接接头的全位置焊接。
目前,我国投入使用的管道自动焊接设备大多是焊接机械手或固定管道预制系统。焊接工件只能在工厂车间预制,然后运输到施工现场,由焊工焊接。手工电弧焊仍主要用于现场管道施工,是目前管道焊接施工现场常见的生产方法,存在诸多不便。因此,览众现场施工管道焊接机器人在我国有很大的应用和发展空间。
长距离、大直径、厚壁管道市场需求的增加将推动焊接系统的发展。 随着自动焊接系统的频繁应用,熟练劳动力将继续扩大,启动成本将降低,工作时间将减少,效率将提高,质量将提高,操作将简化,其他特点将增加人们对各种自动焊接的兴趣和使用。 随着电源的改善和计算机系统对现场焊接的不断适应,自动焊接将成为管道施工的主要焊接方法。由于竞争,它将不断刺激新的发展,进一步提高自动焊接在管道中的应用。
多功能全数字化逆变弧焊电源技术。关键技术主要有针对不同电弧过渡形式中的电弧物理与工艺特征的优化控制模式,数字化逆变焊接电源的研究开发不仅仅是电路的开发与创新,必须将逆变电源的开发与工艺,特别是电弧物理相结合,开发新型的、更高性能的、更多功能的弧焊电源,推动使用量大面广的弧焊技术的发展。