览众科技:管道自动焊机-自动焊接机-自动焊接设备
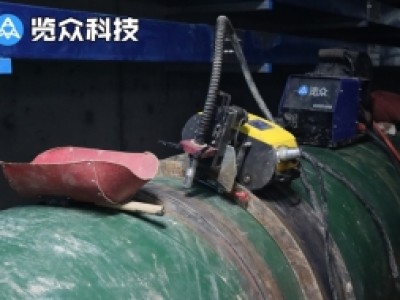
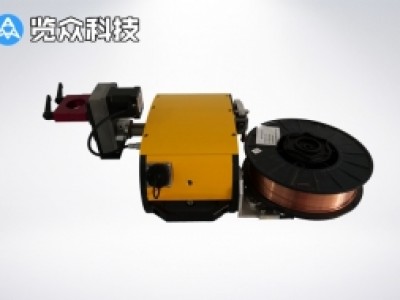
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下天然气天然气管道自动焊接机,所谓的天然气天然气管道自动焊接机其实是一种自动焊接设备,属于焊接机器人的一种。天然气天然气管道自动焊接机运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
焊接机器人是从事焊接(包括切割和喷涂)的工业机器人,根据国际标准化组织(标准化组织)工业机器人术语标准焊接机器人的定义,工业机器人是一种具有三个或三个以上可编程轴的多用途、可重复编程的自动控制机械手,用于工业自动化领域。

实验室反应釜焊接结构刚度较大的工件时,常采用预热的方法。预热一方面可以减少冷却速度,减缓在冷却过程中产生的拉伸应力,另一方面也可改善结晶条件,减少化学和物理上的不均匀性。预热温度要根据钢种的化学成分和结构刚度的大小而定。钢种含碳量越高,其他合金元素越多,工作刚度越大,则要求预热温度越高。

焊接机械化是指焊接头的移动和焊丝的输送由机械完成。在焊接过程中,焊接头相对于焊缝中心的位置以及焊丝和焊缝表面之间的距离仍然必须由焊接操作人员监控和手动调节。焊接自动化是指由焊工自始至终自动完成焊接过程,无需对操作工作进行任何调整,即通过焊工的自适应控制系统实现焊接过程中焊头的位置校正和各种焊接参数的调整。
焊缝成型差,影响后序的内外焊跟踪,影响焊接过程的稳定,从而影响焊接质量。焊缝成型与线能量密切相关,焊接电流、电弧电压一定,焊速增大,焊缝熔深和熔宽减小,导致焊缝成型差。当焊缝中产生气孔时,也常常产生焊缝成型差现象。
主控制器采用览众自研机器人控制器作为核心控制单元。根据客户的产品要求,可以通过修改控制软件的程序和参数来调整设备的功能,实现圆形、半圆形、分段多段圆弧和环形焊缝的焊接。整个设备具有很强的智能性和灵活性,是一种档次更高、性价比更高、可靠性更高的控制器。
焊接参数如电流、电压、焊枪摆动速度、摆动幅度、两端停留时间等可以在焊接前设定,也可以在焊接过程中实时调整。 驱动控制系统采用基于脉宽调制调速的DC伺服驱动控制技术和位移传感检测闭环控制系统,定位精度高,抗干扰能力强,实现了现场使用所需的可靠性和耐久性。为了实现高摆动速度下摆动的精确控制,本项目采用位置反馈摆动控制传感电路。通过专门设计的传感器,摆动系统的位移转化为可控电信号,同时具有位置记忆功能。适用于大中型长输管道固定连接接头的全位置焊接。
及时插入清枪程序。编写一定长度的焊接程序后,应及时插入清枪程序,可以防止焊接飞溅堵塞焊接喷嘴和导电嘴,保证焊枪的清洁,提高喷嘴的寿命,确保可靠引弧、减少焊接飞溅。