览众科技:管道自动焊机-自动焊接机-自动焊接设备
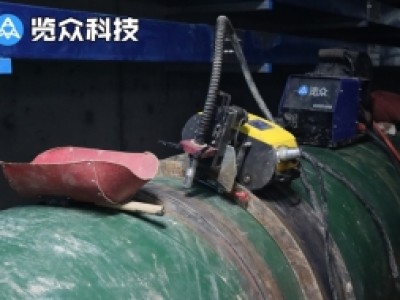
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下煤业钢管管道半自动焊机,所谓的煤业钢管管道半自动焊机其实是一种自动焊接设备,属于焊接机器人的一种。煤业钢管管道半自动焊机运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
什么叫焊接?答:两种或两种以上材质(同种或异种),通过加热或加压或二者并用,来达到原子之间的结合而形成永久性连接的工艺过程叫焊接.

焊丝的选用。焊丝的选用应使在正常焊接工艺下的焊缝在焊后状态的抗拉强度不低于母材退火状态的标准抗拉强度下限值,焊缝焊后状态的塑性和耐蚀性能不低于退火状态下的母材或与母材相当,焊接性能良好,能满足钛容器制造和使用的要求。

焊缝跟踪和偏差控制是实现焊接自动化的关键技术。 在环境信息采集过程中,视觉传感器具有信息量大、精度高、不与工件接触等优点。,具有良好的应用空间和前景。 根据不同的成像光源,视觉传感器可以分为主动视觉传感器和被动视觉传感器 无源视觉传感器使用摄像机直接获取视觉信息,无需辅助光源,具有抗干扰能力强、系统结构简单、成本低等优点。
采用合理的焊接顺序并选用合适的焊接规范和操作方法,还要采用反变形和刚性固定措施。
焊接机械化是指焊接头的移动和焊丝的输送由机械完成。在焊接过程中,焊接头相对于焊缝中心的位置以及焊丝和焊缝表面之间的距离仍然必须由焊接操作人员监控和手动调节。焊接自动化是指由焊工自始至终自动完成焊接过程,无需对操作工作进行任何调整,即通过焊工的自适应控制系统实现焊接过程中焊头的位置校正和各种焊接参数的调整。
未焊透:母材之间或母材与熔敷金属之间存在局部未熔合现象。它一般存在于单面焊的焊缝根部,对应力集中很敏感,对强度疲劳等性能影响较大。其产生的原因是:1.坡口设计不良,角度小、钝边大、间隙小。2.焊条、焊丝角度不正确。3.电流过小,电压过低,焊速过快,电弧过长,有磁偏吹等。4.焊件上有厚锈未清除干净。5. 埋弧焊时的焊偏。
工件厚度大于6mm时应采用向上立焊。这时熔深较大、熔透可靠。但是由于熔池较大,使铁液流失倾向增加。为了能形成焊缝,不得使用过大参数。通常采用的焊接参数为焊接电流120-150A、电弧电压18-20V的短路过渡形式。这时形成的熔池较小,熔池始终跟随电弧移动,前面的熔池金属也同时凝固,保证了熔池不致流淌。