览众科技:管道自动焊机-自动焊接机-自动焊接设备
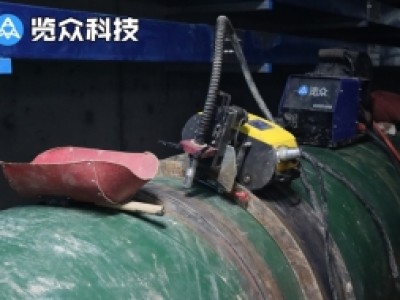
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下热网钛合金管道全自动焊接机器人,所谓的热网钛合金管道全自动焊接机器人其实是一种自动焊接设备,属于焊接机器人的一种。热网钛合金管道全自动焊接机器人运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
立焊时的主要运条方式有两种,一为直线式,气为摆动式。能够进行平板对接、丁字接和角接接头的焊接。立焊时的关键在于保持熔池不流淌。由于保持熔池很难,而极易发生咬边、焊瘤、焊缝成形不均匀(熔深和熔宽)和焊道表面凹凸不平。

焊接时,为了抢进度,对于中厚板对接焊缝采取不开坡口。强度指标下降,甚至达不到标准要求,弯曲试验时出现裂纹,这样会使焊缝接头性能不能保证,对结构安全构成潜在危害。【措施】焊接时要按工艺评定中的焊接电流控制,允许有10~15%浮动,坡口的钝边尺寸不宜超过6mm。对接时,板厚超过6mm时,要开坡口进行焊接。

进入21世纪以来,我国的科学技术水平飞速发展。机器人技术在国内外取得了广泛的发展,并已广泛应用于各行各业和各个领域。 机器人的广泛使用促进了生产,改变了人们的生活。如今,机器人负责一些重要的工作和危险的工作。
便携式管道自动焊接机器人,可以实现管道自动焊接,主要有以下优点:(1)焊接质量和效率成倍提高;(2)管道建设成本显著降低;(3)让工人脱离高强度体力劳动,减少人身伤害;(4)减少建设项目对高级技术人员的依赖;
自动管道焊接机是根据磁性管道切割机的原理设计的,但精度要求较高。只要在管道焊接的焊接过程中设置初始焊接参数,焊接参数就会根据焊接过程中的不同位置自动匹配。设备系统内部配备有焊接专家程序,几乎不需要过多的人员干预。现场管道自动焊接的焊接电流、电压等技术参数可通过无线遥控器设定。操作基础方便,干扰小,设计美观。还可以根据管理人员的要求设置系统密码,以确保工人在焊接过程中可以随意调整焊接参数,从而导致焊接质量问题,我公司自主知识产权开发的全位置管道焊接机,大大提高了用户在现场管道施工过程中的焊接速度,同时也保证了焊缝拍摄的资质,解决了高级管道焊工招工难的问题。
斩波器电源的优缺点:斩波器电源使用大型变压器将电网的高压转换成焊接所需的低压,然后将其整流成直流(一般为80V),然后使用大功率IGBT高速切换低压电源,从而获得瞬态负载率为100%的高频直流电源 因此,焊接DC电源具有快速的高频响应,所以电流非常稳定,并且由于采用大功率变压器,输出较少,因此与逆变电源和可控硅电源相比节省了功率。 斩波电源采用80V低压大功率IGBT,安全性提高了数倍。在电网电压不稳定的情况下,IGBT前方有一台大型变压器作为隔离变压器保护,因此对瞬时高压和低压都有隔离保护。故障率大大降低,系统稳定性很高,控制良好。因此,斩波电源故障率低,电流稳定。
为什么CO2焊比焊条电弧焊的综合成本低? 答:〈1〉坡口截面积减少36-54%, 节省填充金属量;〈2〉降低耗电量65.4%;〈3〉设备台班费较焊条电弧焊降低67-80%,降低成本20-40%〈4〉减少人工费、工时费,降低成本10-16%; 〈5〉节省辅助工时、辅料消耗及矫正变形费用;
夹渣:在焊缝金属内部或熔合线部位存在非金属夹杂物。夹渣对力学性能有影响,影响程度与夹杂的数量和形状有关。其产生的原因是:1.多层焊时每层焊渣未清除干净。2.焊件上留有厚锈。3.焊条药皮的物理性能不当。4.焊层形状不良,坡口角度设计不当。5.焊缝的熔宽与熔深之比过小,咬边过深。6.电流过小,焊速过快,熔渣来不及浮出。