览众科技:管道自动焊机-自动焊接机-自动焊接设备
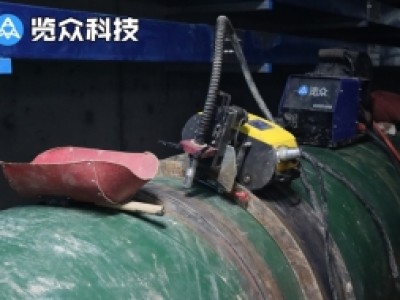
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下热网合金管道焊机,所谓的热网合金管道焊机其实是一种自动焊接设备,属于焊接机器人的一种。热网合金管道焊机运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
气孔产生原因:a、母材或焊丝上有油、锈、污、垢等;b、焊接场地空气流动大,不利于气体保护;c、焊接电弧过长,降低气体保护效果;d、喷嘴与工件距离过大,气体保护效果降低;e、焊接参数选择不当;f、重复起弧处产生气孔;g、保护气体纯度低,气体保护效果差;h、周围环境空气湿度大。

影响选择预热温度的其他因素还有材料厚度、填充金属种类、焊接方法、拘束度等。含碳小于0.1%时,可不预热,也有建议预热至200℃的l含破t为0.1%~0.2%时,预热200~260℃。在特别苛刻情况下可采用更高的预热温度,如预捕400~450℃,但要注意高温预热带来的不利影响。古碳量大于0.2%时,焊接较为困难,除预热外,需要保持层间温度。

焊接技术是随着铜铁等金属的冶炼生产、各种热源的应用而出现的。古代的焊接方法主要是铸焊、钎焊、锻焊、铆焊。中国商朝制造的铁刃铜钺,就是铁与铜的铸焊件,其表面铜与铁的熔合线婉蜒曲折,接合良好。
焊缝裂纹,钢与铜及其合金焊接焊缝中产生裂纹属热裂纹,其产生的原因是:①铜与钢的物理性能差异很大,钢与铜的热膨胀和导热率相差很大,因此焊接时接头中产生很大的应力,导致焊缝产生裂纹。②由于铜和铜金属焊接时热裂纹倾向较大而钢与铜及铜合金焊接时焊缝是铁与铜的混合物,因此随着含铜量增加,产生热裂纹倾向也较大。
工艺管道环缝组装难以达到均匀一致的高精度,需要自动管道焊接机根据坡口尺寸和偏差自动调整焊枪位置,从而实现焊缝的自动跟踪。然而,由于焊接过程中应用环境恶劣,传感器容易受到弧光、高温、烟雾、飞溅、振动和电磁场的干扰,很难实现焊缝的自动跟踪。览众借助高精度视觉传感器和机器视觉技术开发了管道全位置焊接过程中的焊缝跟踪功能,大大提升了焊接质量与焊接效率,降低了操作者的学习难度、工作难度与强度。
焊缝应清洗干净,无油污、铁锈、焊渣、割渣等杂物,允许有可焊性底漆。否则,将影响引弧成功率。定位焊由焊条焊改为气体保护焊,同时对点焊部位进行打磨,避免因定位焊残留的渣壳或气孔,从而避免电弧的不稳甚至飞溅的产生。
进入21世纪以来,我国的科学技术水平飞速发展。机器人技术在国内外取得了广泛的发展,并已广泛应用于各行各业和各个领域。 机器人的广泛使用促进了生产,改变了人们的生活。如今,机器人负责一些重要的工作和危险的工作。
现场焊接位置为管道水平固定或倾斜固定对接,包括水平焊接、垂直焊接、顶焊、水平焊接等焊接位置。 因此,对焊工的操作技术提出了越来越高的要求。
以上就是给大家介绍有关热网合金管道焊机的内容,如果你喜欢我分享的文章,请关注览众自动焊接机器人。