览众科技:管道自动焊机-自动焊接机-自动焊接设备
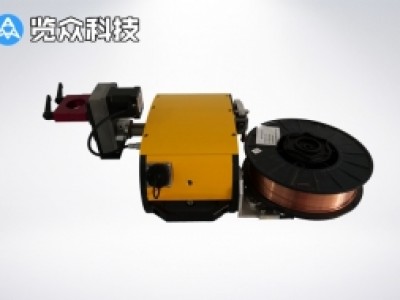
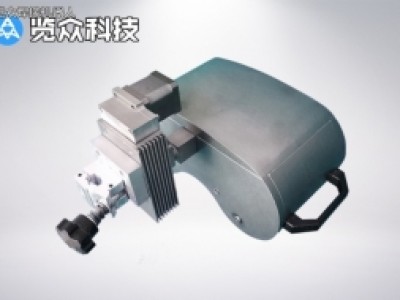
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下全位置管子焊接设备,所谓的全位置管子焊接设备其实是一种自动焊接设备,属于焊接机器人的一种。全位置管子焊接设备运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
(1)为览众焊接机器人准备特殊的焊接工艺,对零件尺寸、焊缝坡口和装配尺寸做出严格的工艺规定。一般零件和坡口尺寸公差控制在0.8毫米以内,装配尺寸误差控制在1.5毫米以内,可以大大降低气孔、咬边等焊接缺陷的概率。

界各主要工业发达国家都非常重视发挥焊接研究机构的作用,基本上都形成大学研究所企业的三级研究开发体系。各主要工业发达国家都成立了焊接研究所,如英国的焊接研究所(TWI)、美国的爱迪生焊接研究所(EWI)、法国焊接研究所(FWI)、日本的连接与溶接研究所(JWRI)、乌克兰的巴顿电焊研究所(PEWI)、德国亚琛大学的焊接研究所(ISF)和德国焊接学会(DVS)下属的分布在全国各地的焊接研究与培训中心(SLV)等,而韩国的焊接研究中心是设在韩国现代科学技术研究院(KAIST)的韩国工业生产技术研究院KITCH之内。它们都属于国家级的焊接研究机构。

焊接注意事项1。弧长弧长与电极涂层的类型和涂层厚度有关。然而,应尽可能采用短弧,特别是对于低氢焊条。长弧可能导致气孔。短弧可以防止O2和N2等有害气体侵入焊缝金属,形成氧化物等不良杂质,影响焊缝质量。2.焊接速度合适的焊接速度是基于焊条直径、涂层类型、焊接电流、焊接物体的热容量、结构起点和其他条件的相应变化,因此不能制定标准规定。通过保持适当的焊接速度,熔渣可以很好地覆盖熔池。使熔池中的各种杂质和气体有足够的漂浮时间,避免在焊缝中形成夹渣和气孔。在焊接中,如果焊条运输速度过快,当焊接部分冷却时,收缩应力将增加,这将导致焊缝出现裂纹。
焊接时不注意从焊接顺序、人员布置、坡口形式、焊接规范选用及操作方法等方面控制变形,从而导致焊接后变形大、矫正困难、增加费用,尤其是厚板及大型工件,矫正难度大,用机械矫正易引起裂纹或层状撕裂。用火焰矫正成本高且操作不好易造成工件过热。
例如,在选择了合适的焊接工艺后,通过大量实验确定了节点0、30、60、90、120、150和180处的理想焊接电流、电压、送丝速度、小车行走速度和焊枪振动频率等一系列参数,然后将这些参数输入计算机进行自动拟合和运算,但实际焊接和测试的数据并不完全相同,因此可以根据焊接过程中的实际情况调整送丝速度和振动频率等焊接参数。
由于发现和开采的油气田位于偏远地区,地理、气候、地质条件恶劣,社会支持条件差,给建设带来了许多困难,尤其是低温带来的麻烦最大。