览众科技:管道自动焊机-自动焊接机-自动焊接设备
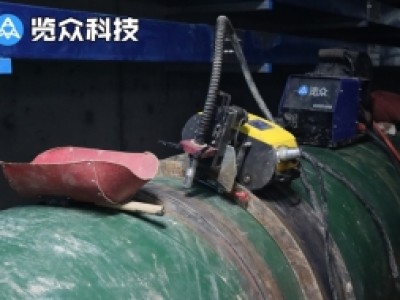
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下小空间钢管数控自动焊机,所谓的小空间钢管数控自动焊机其实是一种自动焊接设备,属于焊接机器人的一种。小空间钢管数控自动焊机运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
夹渣:在焊缝金属内部或熔合线部位存在非金属夹杂物。夹渣对力学性能有影响,影响程度与夹杂的数量和形状有关。其产生的原因是:1.多层焊时每层焊渣未清除干净。2.焊件上留有厚锈。3.焊条药皮的物理性能不当。4.焊层形状不良,坡口角度设计不当。5.焊缝的熔宽与熔深之比过小,咬边过深。6.电流过小,焊速过快,熔渣来不及浮出。

近几年,我国焊管生产装备技术水平得到了进一步提升。目前,占我国焊管年产量50%以上的生产机组均为国际先进水平,部分已达到国际领先水平。焊管产品的质量也得到进一步提升,已基本能够满足国内需求。
镍基耐蚀合金的焊接要点:镍基合金一般可采用与奥氏体不锈钢相同的焊接方法进行焊接。这里就最常用的钨极气体保护焊和焊条电弧焊进行论述。无论是何种焊接方法,焊前一定要彻底清理焊接区表面,镍基合金对污染物的危害极为敏感,母材应尽可能在固溶状态下焊接。
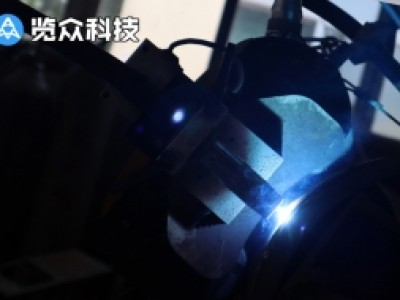
焊接参数如电流、电压、焊枪摆动速度、摆动幅度、两端停留时间等可以在焊接前设定,也可以在焊接过程中实时调整。 驱动控制系统采用基于脉宽调制调速的DC伺服驱动控制技术和位移传感检测闭环控制系统,定位精度高,抗干扰能力强,实现了现场使用所需的可靠性和耐久性。为了实现高摆动速度下摆动的精确控制,本项目采用位置反馈摆动控制传感电路。通过专门设计的传感器,摆动系统的位移转化为可控电信号,同时具有位置记忆功能。适用于大中型长输管道固定连接接头的全位置焊接。
什么叫正接法?答:直流电弧焊时,焊件接电焊机输出端的正极,焊枪(焊钳)接输出端的负极的接线法,叫“正接法”也称正极性。
飞溅过多可能为焊接参数选择不当、气体组分原因或焊丝外伸长度太长,可适当调整功率的大小来改变焊接参数,调节气体配比仪来调整混合气体比例,调整焊枪与工件的相对位置。焊缝结尾处冷却后形成一弧坑,编程时在工作步中添加埋弧坑功能,可以将其填满。
国外近年来焊接技术的发展可以用下列有关工业机器人、焊接新电源和激光焊接技术等发展过程的几个例子来简要说明产学研结合的重要性。日本在1972年第一次国际全球石油危机之后,为了提高其汽车产业在国际上的竞争地位,开始引进、吸收美国的机器人技术,政府资助产学研结合大力发展本国的工业机器人产业,政府对应用本国机器人的制造企业给予税收的优惠
3、一氧化碳焊机出现故障和异常情况,经检查和确认未能排除后,一氧化碳焊机应关闭电源,联系电工进行修理。
以上就是给大家介绍有关小空间钢管数控自动焊机的内容,如果你喜欢我分享的文章,请关注览众自动焊接机器人。