览众科技:管道自动焊机-自动焊接机-自动焊接设备
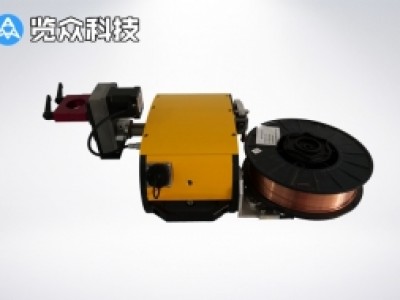
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下现场施工过滤器全自动焊接机器人,所谓的现场施工过滤器全自动焊接机器人其实是一种自动焊接设备,属于焊接机器人的一种。现场施工过滤器全自动焊接机器人运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
为了满足现场要求,达到焊接质量,提高劳动效率,本发明具有重量轻、操作简单、体积小、安装调试维护方便的优点,管道焊接工程的现场施工在现场进行,一般施工周期相对较长。小型现场管道自动焊接机一般是采用全位置自动焊接。它由控制系统和机械系统组成,全位置管道自动焊机的执行系统是一个磁吸式小车机械系统。

焊接技术(包括连接、切割、涂敷)现在以及将来,都有最大可能成功地将各种材料加工成可投入市场的产品的首选加工方法。焊接不再是一种“应召工艺”,它将逐步集成到产品的全寿命过程,从设计、开发、制造到维修、再循环的各个阶段。焊接将被认为对改善产品全寿命的成本、质量和可靠性是至关重要的手段,而且对提高产品的市场竞争力有重要贡献。

目前,国内投入使用的管道自动焊接设备大多是焊接机械手或固定式管道预制系统,焊接后的工件只能在工厂车间预制,然后运到施工现场,再由焊工焊接。手工电弧焊仍主要用于现场管道施工,是目前管道焊接施工现场常见的生产方法,存在诸多不便。因此,现场施工管道焊接机器人在我国有很大的应用和发展空间。
与焊接裂纹相关的预防措施:加强焊缝坡口的清理,清除所有有害物质;加强焊前预热温度的控制;焊接前烘烤坡口根部,去除所有水分和湿气,降低焊缝中的氢含量。严格控制熔合比:在保证材料能够完全焊接的情况下,严格控制钢的母材中熔融金属在所有焊接接头中的比例,以减少母材中有害物质对焊接接头性能的相关影响。
工件焊后不应从焊接温度直接升温进行圆火处理。因为在焊接过程中奥氏体可能未完全转变,如焊后立即升沮回火,会出现碳化物沿臭氏体晶界沉淀和臭氏体向珠光体转变,产生品粒粗大的组织,严重降低韧性。因此圆火前应使焊件冷却,让焊缝和热影响区的奥氏体基本分懈完了。对于刚度小的构件,可以冷至室温后再回火.对于大厚度的结构,特别当含碳量较高时,需采用较复杂的工艺;焊后冷至100~150℃,保温0.5~1.0h,然后加热至圆火温度。
天然气作为日常生活和工业生产中最重要的燃料,其需求量日益增加,因此天然气的运输成为人们关注的焦点问题。 管道运输作为最流行的运输方式,也是一种相对低廉的运输方式,越来越受到人们的青睐。
工艺管道环缝组装难以达到均匀一致的高精度,需要自动管道焊接机根据坡口尺寸和偏差自动调整焊枪位置,从而实现焊缝的自动跟踪。然而,由于焊接过程中应用环境恶劣,传感器容易受到弧光、高温、烟雾、飞溅、振动和电磁场的干扰,很难实现焊缝的自动跟踪。览众借助高精度视觉传感器和机器视觉技术开发了管道全位置焊接过程中的焊缝跟踪功能,大大提升了焊接质量与焊接效率,降低了操作者的学习难度、工作难度与强度。
目前,我国投入使用的管道自动焊接设备大多是焊接机械手或固定管道预制系统。焊接工件只能在工厂车间预制,然后运输到施工现场,由焊工焊接。手工电弧焊仍主要用于现场管道施工,是目前管道焊接施工现场常见的生产方法,存在诸多不便。因此,览众现场施工管道焊接机器人在我国有很大的应用和发展空间。