览众科技:管道自动焊机-自动焊接机-自动焊接设备
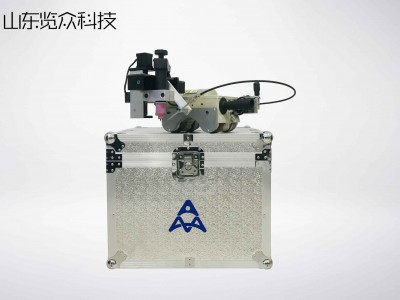
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下全位置反应釜自动焊接设备,所谓的全位置反应釜自动焊接设备其实是一种自动焊接设备,属于焊接机器人的一种。全位置反应釜自动焊接设备运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
错边,这是预焊中最常见问题,错边超差,直接导致钢管的降级或报废。所以,预焊时要求严格控制错边量。当整根或大半根钢管坯出现错边超差时,一般是由于:(1)开口缝调整不到位(2)合缝压辊调整不到位(压辊的周向角度不对,或以管坯中心线为轴线,左右压辊不对称,或相对的压辊的径向伸长量不一致),没有压圆;(3)预弯边没有预弯到位,板边丰在直边现象所致。当管坯的头或尾的、出现错边超差时,一般是由于;(1)进出口辊道的位置不对;(2)环形架中心不对;(3)合缝压辊压圆不好,个别压辊位置偏差;(4)成型不好(成型后的管坯两边高低相差较大;(5)开口缝宽在150mm以上);(6)液压系统压力波动所致。

览众焊接机器人的优点之一是可以代替施工人员在危险或有害的恶劣环境中工作,从而避免受伤。为了施工人员的安全,览众焊接机器人工作时,任何人不得进入其运动安全范围所在的区域,其运动区域不应有任何干扰,这是安全管理的最基本部分。

尽管如此,机器人在焊接过程中,也难免出现焊偏、咬边、气孔等焊接缺陷,焊接机器人在长期的工作中也可能会出现各种故障,本文重点分析处理焊接缺陷和常见故障。
随着高灵敏度传感技术、计算机控制技术和精密机械的发展,焊接过程的全自动化已经从实验室进入工业生产领域。锅炉、压力容器和管道制造业有望率先实现焊接生产过程的全自动化。
1957年美国的盖奇发明等离子弧焊;40年代德国和法国发明的电子束焊,也在50年代得到实用和进一步发展;60年代又出现激光焊等离子、电子束和激光焊接方法的出现,标志着高能量密度熔焊的新发展,大大改善了材料的焊接性,使许多难以用其他方法焊接的材料和结构得以焊接。
④不要引弧(不要点火),确认主机电压表有电压指示,不低于60 Va、检查焊接电缆接触点是否松动或碳化,焊接电缆是否断裂或损坏。b、检查co焊枪是否有故障。c、如果co焊枪抓住开关,送丝很快,电弧没有开始,应立即停止,检查co焊枪和焊接电缆是否因破皮泄漏而与母材短路。
飞溅过多可能为焊接参数选择不当、气体组分原因或焊丝外伸长度太长,可适当调整功率的大小来改变焊接参数,调节气体配比仪来调整混合气体比例,调整焊枪与工件的相对位置。焊缝结尾处冷却后形成一弧坑,编程时在工作步中添加埋弧坑功能,可以将其填满。