览众科技:管道自动焊机-自动焊接机-自动焊接设备
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下窄间隙特种钢全自动焊机,所谓的窄间隙特种钢全自动焊机其实是一种自动焊接设备,属于焊接机器人的一种。窄间隙特种钢全自动焊机运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
裂纹产生原因:a、结构设计不合理,焊缝过于集中,造成焊接接头拘束应力过大;b、熔池过大、过热、合金元素烧损多;c、焊缝末端的弧坑冷却快;d、焊丝成分与母材不匹配;e、焊缝深宽比过大。防止措施:a、正确设计焊接结构,合理布置焊缝,使焊缝尽量避开应力集中区,合理选择焊接顺序;b、减小焊接电流或适当增加焊接速度;c、收弧操作要正确,加入引弧板或采用电流衰减装置填满弧坑;d、正确选用焊丝。

览众管道气保自动焊接设备采用实芯焊丝(φ 0.8 ~ φ 1.0),采用CO2或混合气体(CO2+氩) 焊接方向是向下焊接。焊丝进给速度、焊接速度、摆动频率等焊接工艺参数由焊接工艺参数输入装置输入,焊工不能修改(或者只能在一定程度上修改某些参数),以保证每个焊接机器人和每个接头的焊接工艺参数的一致性。 从而保证各焊接接头焊接质量的均匀性,达到保证焊接质量的目的。

在全位置管道焊接过程中,焊枪的位置不断变化。由于地球引力的影响,熔池在不同位置的表面张力差异很大。为了保证焊接质量,要求焊接参数随位置变化。览众现场施工管道自动焊接机的控制系统都增加了位置传感功能,可以一次实现各层焊接参数的自由设置和平滑过渡,即焊接专家库系统,同时向用户开放使用权限,用户可以在此平台上独立开发所需的焊接工艺。 所需的焊接参数预先预置在系统中,预置的焊接参数可以在施工现场打开直接调用,系统在焊接过程中实时调用设定的参数。 在确保焊缝形成一致的同时,也确保焊缝形成的美观。这一个细节功能,降低了操作者的学习难度,确保可以在短时间内学会焊接机器人的操作。
为了提高管道组装和焊接的速度和质量,有必要采用流水作业施工技术,焊接接头可采用薄层多道焊,每道焊的厚度一般不超过1.5毫米,以保证焊接缺陷不超过1毫米。
起弧不良产生原因:a、接地不良;b、导电嘴尺寸不对;c、没有保护气体。防止措施:a、检查所有接地情况是否良好,使用慢启动或热起弧方式以方便起弧;b、检查导电嘴内空是否被金属材料堵塞;c、使用气体预清理功能;d、改变焊接参数。
焊瘤:在焊接过程中,熔化金属流到焊缝外未熔化的母材上所形成的金属瘤,它改变了焊缝的截面积,对动载不利。其产生的原因是:1.电弧过长,底层施焊电流过大。2.立焊时电流过大,运条摆动不当。3.焊缝装配间隙过大。
焊接较厚的钢板时,为了焊透而在接边处开出各种形状的坡口,以便较容易地送入焊条或焊丝。坡口形式有单面施焊的坡口和两面施焊的坡口。选择坡 便携式管子焊机
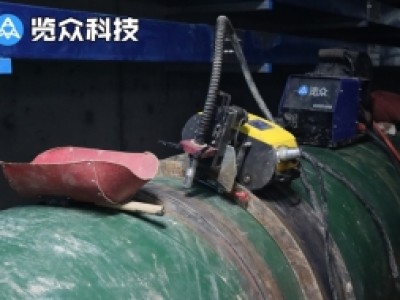
览众焊接机器人给大家介绍一下便携式管子焊机,所谓的便携式管子焊机其实是一种自动焊接设备,属于焊接机器人的一种。便携式管子焊机运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
现场焊接位置为管道水平固定或倾斜固定对接,包括水平焊接、垂直焊接、顶焊、水平焊接等焊接位置。 因此,对焊工的操作技术提出了越来越高的要求。

在螺旋焊管中,由于钢带的月牙弯、“s”弯,造成成型缝间隙的不均匀性,这就给焊接带来困难,造成焊缝熔深的不稳定,同时也造成焊缝余高的变化,成型缝偏松时,焊缝熔深大,余高降低;成型缝偏紧时,焊缝熔深小,余高增加,所以在焊接过程中,解决此问题的办法是:成型缝松时,减小焊接规范,成型缝紧时,加大焊接规范。

为了使行走电机执行计算机控制单元发出的位置和速度指令,电机应配有测速反馈机构,以保证电机在管道环空各位置的准确对准,并具有良好的速度跟踪功能。
在焊缝末端冷却后形成弧坑。编程时,在工作步骤中增加了埋弧坑功能,可以填充。
枪支碰撞。这可能是由于工件装配偏差或焊枪的传输控制点不准确造成的,因此您可以检查装配或纠正焊枪的传输控制点。
2.它能有效地替代手工焊接,减少对焊工操作技术的依赖。避免身体状况、工作情绪、熟练程度等各种人为因素的影响,保证焊接的一致性和可靠性,有效解决部分企业焊工短缺的问题。
21世纪以来,我国科技水平发展迅速,机器人技术在国内外得到了广泛发展,并已广泛应用于各行各业和各个领域。机器人的广泛使用促进了生产,改变了人们的生活。如今,一些重要的工作和危险的工作都是由机器人完成的。
以上就是给大家介绍有关便携式管子焊机的内容,如果你喜欢我分享的文章,请关注览众自动焊接机器人。
口形式时,除保证焊透外还应考虑施焊方便,填充金属量少,焊接变形小和坡口加工费用低等因素。