览众科技:管道自动焊机-自动焊接机-自动焊接设备
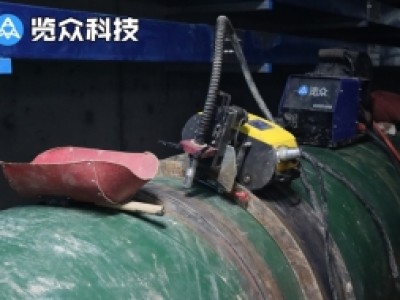
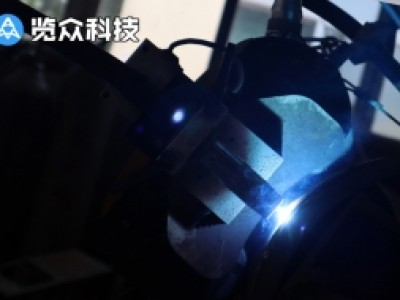
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下全位置钢管自动焊接机,所谓的全位置钢管自动焊接机其实是一种自动焊接设备,属于焊接机器人的一种。全位置钢管自动焊接机运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
焊接小车应具有外形美观、体积小、重量轻、操作方便的特点。其核心部件是行走机构、送丝机构和焊枪摆动调节机构。行走机构由电机和齿轮传动机构组成。
由于药芯焊丝价格较高,同时要解决保护气体的气源问题,焊接成本较高。单独使用自保护焊丝节省了保护气体,但清渣困难。

焊后热处理的目的是降低焊缝和热影响区硬度,改善其塑性和韧性,同时减少焊接残余应力。焊后热处理包括回火和完全退火.只有在为了得到最低硬度,如需焊后机加工时,才采用完全退火,退火温度为830~880℃,保温2h后炉冷至595℃,然后空冷。高铬马氏体不锈钢一般在淬火十回火的调质状态下焊接,焊后经高温回火处理,使焊接接头具有良好韵力学性能0如果在退火状态下焊接,焊后仍会出现不均匀的马氏体组织,整个焊件还需经过调质处理,使接头具有均匀的性能。
激光焊接、激光与其它热源复合焊接以及搅拌摩擦焊等新型焊接技术。关键焊接技术主要有激光与材料的作用机理、激光与其它能源的复合机理、搅拌摩擦焊的成形机理的深层次认识,以及新工艺技术在新型材料(包括铝、镁、钛合金及超高强钢等)焊接中的冶金特性。
1951年苏联的巴顿电焊研究所创造电渣焊,成为大厚度工件的高效焊接法。1953年,苏联的柳巴夫斯基等人发明二氧化碳气体保护焊,促进了气体保护电弧焊的应用和发展,如出现了混合气体保护焊、药芯焊丝气渣联合保护焊和自保护电弧焊等。
焊接速度对焊接质量和焊接生产效率有重大影响,选用时配合焊接电流、焊缝位置(打底焊,填充焊,盖面焊)、焊缝的厚薄、坡口尺寸选取适当的焊接速度,在保证熔透,气体、焊渣易排出,不烧穿,成形良好的前提下选用较大的焊接速度,以提高生产率效率。
自动管道焊接机器人,又称自动管道焊接机,作为工业管道预制中最重要的自动焊接设备,在我国管道运输行业得到越来越广泛的应用 所谓管道焊接机器人(pipeline welding robot)是在管道焊接生产领域代替焊工进行焊接工作的机器人,因为它具有焊接质量稳定、改善工人焊接工作环境和工作条件、提高劳动生产效率的优点。随着管道自动焊接机器人的快速发展,价格越来越便宜,性价比不断提高。这表明管道自动焊接机器人的应用和发展已经迎来了一个很大的空间,管道运输业建设将得到了极大的推动。
预焊中飞溅容易烧伤钢管表面或坡口,且不易清除,从而影响焊接质量和钢管外表面质量。产生飞溅的原因主要是保护气体成分不对或工艺参数不对,应搞保护气体中氩气的比例。