览众科技:管道自动焊机-自动焊接机-自动焊接设备
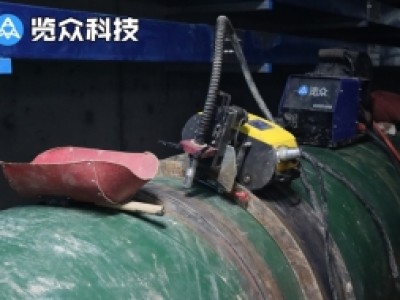
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下室外圆筒焊接设备,所谓的室外圆筒焊接设备其实是一种自动焊接设备,属于焊接机器人的一种。室外圆筒焊接设备运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
钛及钛合金杂质元素的沾污引起脆化:钛是一种活性元素,特别是在焊接高温下非常容易吸收氮、氢、氧,从而使焊缝的硬度、强度增加,塑性、韧性降低,引起脆化。碳也会与钛形成硬而脆的TiC,易引起裂纹。因此,钛及钛合金焊接时必须进行有效的保护,防止空气或其他因素的污染。因此钛及钛合金焊接不能采用气焊或焊条电弧焊方法进行,否则接头满足不了焊接质量要求,一般只能采用氩气保护或在真空下焊接。

全球工业机器人需求快速扩张。据国际机器人联合会(IFR)统计,2002-2012年,全球新装工业机器人年均增速约为9%。其中,2010年和2011年出现需求激增。据预计,到2025年,约5-15%的制造业工人将被工业机器人取代,全球装机量年均增速为25-30%,高于过去二十多年的增长水平,但低于2011年和2012年的增速。

选择合理的焊接顺序。以减小焊接变形、焊枪行走路径长度来制定焊接顺序。焊枪空间过渡要求移动轨迹较短、平滑、安全。优化焊接参数。为了获得最佳的焊接参数,制作工作试件进行焊接试验和工艺评定。
气体保护焊电弧加热集中、焊接速度快、熔深大,故焊缝强度比手工焊的高,且塑性和抗腐性好,适合厚钢板或特厚钢板(t>100mm)的焊接。
夹渣:在焊缝金属内部或熔合线部位存在非金属夹杂物。夹渣对力学性能有影响,影响程度与夹杂的数量和形状有关。其产生的原因是:1.多层焊时每层焊渣未清除干净。2.焊件上留有厚锈。3.焊条药皮的物理性能不当。4.焊层形状不良,坡口角度设计不当。5.焊缝的熔宽与熔深之比过小,咬边过深。6.电流过小,焊速过快,熔渣来不及浮出。
合理的变位机位置、焊枪姿态、焊枪相对接头的位置。工件在变位机上固定之后,若焊缝不是理想的位置与角度,就要求编程时不断调整变位机,使得焊接的焊缝按照焊接顺序逐次达到水平位置,同时,要不断调整机器人各轴位置,合理地确定焊枪相对接头的位置、角度与焊丝伸出长度。工件的位置确定之后,焊枪相对接头的位置通过编程者的双眼观察,难度较大。这就要求编程者善于总结积累经验。
管道施工非常特殊,施工期间对工人的技术要求很高,而且野外施工环境异常恶劣,焊工的工资普遍较高,而且逐年增加。管道施工过程中,人员流量大,施工现场不稳定,人员管理大,施工进度无法保证。览众管道自动焊机使用方便,操作简单,对人员要求极低,大大降低了焊工的技术要求;降低了工作强度,从而提高了焊接效率,降低了施工成本。 从而保证施工过程中人员流动造成工期延误等问题。 自动化管道焊接设备大大提高了用户在现场管道施工中的生产效率,是手工焊接的3-4倍,焊接合格率达到98%以上,成型美观。
以上就是给大家介绍有关室外圆筒焊接设备的内容,如果你喜欢我分享的文章,请关注览众自动焊接机器人。