
 览众科技:管道自动焊机-自动焊接机-自动焊接设备
览众科技:管道自动焊机-自动焊接机-自动焊接设备 览众焊接机器人给大家介绍一下现场施工圆桶自动焊接小车,所谓的现场施工圆桶自动焊接小车其实是一种自动焊接设备,属于焊接机器人的一种。现场施工圆桶自动焊接小车运用磁吸式焊接小车绕管爬行的焊接方法,实现了管道360度全自动焊接。
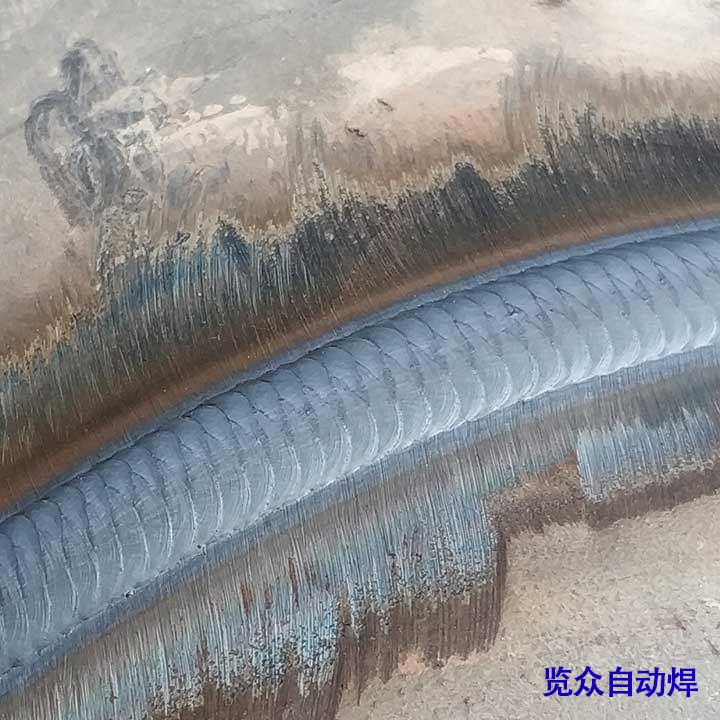
工艺管道环缝组装难以达到均匀一致的高精度,需要自动管道焊接机根据坡口尺寸和偏差自动调整焊枪位置,从而实现焊缝的自动跟踪。然而,由于焊接过程中应用环境恶劣,传感器容易受到弧光、高温、烟雾、飞溅、振动和电磁场的干扰,很难实现焊缝的自动跟踪。览众借助高精度视觉传感器和机器视觉技术开发了管道全位置焊接过程中的焊缝跟踪功能,大大提升了焊接质量与焊接效率,降低了操作者的学习难度、工作难度与强度。

对接焊接通常是在交变和冲击载荷下或在低温和高压容器中工作的连接件的首选。搭接接头焊接前的准备工作简单,装配方便,焊接变形和残余应力小,经常用于现场接头和不重要结构的安装。一般来说,搭接接头不适合在交变载荷、腐蚀介质、高温或低温下工作。
如果管道全位置自动焊接采用埋弧焊技术,焊接装置必须配备抛、撑、回收焊剂的机构,这使得焊接装置的结构更加复杂,给操作和拆装带来不便,增加了行走小车的负荷,影响小车的稳定性。埋弧焊一般采用粗丝大电流焊接方法。
自动或半自动埋弧焊的焊接速度快、生产效率高、成本低、劳动条件好。然而,它们的应用也受到其自身条件的限制,由于焊机须沿着顺焊缝的导轨移动,故要有一定的操作条件。因此,自动或半自动埋弧焊特别适用于梁、柱、板等的大批量拼装、制作焊缝。
界各主要工业发达国家都非常重视发挥焊接研究机构的作用,基本上都形成大学研究所企业的三级研究开发体系。各主要工业发达国家都成立了焊接研究所,如英国的焊接研究所(TWI)、美国的爱迪生焊接研究所(EWI)、法国焊接研究所(FWI)、日本的连接与溶接研究所(JWRI)、乌克兰的巴顿电焊研究所(PEWI)、德国亚琛大学的焊接研究所(ISF)和德国焊接学会(DVS)下属的分布在全国各地的焊接研究与培训中心(SLV)等,而韩国的焊接研究中心是设在韩国现代科学技术研究院(KAIST)的韩国工业生产技术研究院KITCH之内。它们都属于国家级的焊接研究机构。
现代焊接技术已能焊出无内外缺陷的、机械性能等于甚至高于被连接体的焊缝。被焊接体在空间的相互位置称为焊接接头,接头处的强度除受焊缝质量影响外,还与其几何形状、尺寸、受力情况和工作条件等有关。接头的基本形式有对接、搭接、丁字接(正交接)和角接等。对接接头焊缝的横截面形状,决定于被焊接体在焊接前的厚度和两接边的坡口形式。
自20世纪60年代览众焊接机器人投入生产以来,其技术日趋成熟。它具有稳定和提高焊接质量、提高劳动生产率、提高工人劳动强度、在有害环境下工作、降低工人操作技术要求、缩短产品改造和更换准备周期、减少相应设备投资的优点。因此,它已被广泛应用于各行各业。
并且可以在距焊接机器人所在工位最近的地方,安装多个紧急停止开关,一旦发生紧急或危险情况,工作人员可以就近按下急停,让机器人停止运动。另外,最好要将安全电路与生产线安全电路联为一体,遇到紧急情况的时候就可以发挥作用了。




